All gait is a contralateral movement. Although It seems like the most obvious statement (perhaps to the point of being boring), it often astonishes me just how unexamined it remains. Discussing both the theoretical and practical implications—what it means for our training—is what this series of posts is all about.
To say that a movement is contralateral is to say that when something happens in one side, the opposite will happen in the other side. During gait, if our left leg moves forward, our right leg moves back. But our gait is also reciprocal, meaning that the limbs in the same side move in opposition to each other, to balance their movement. If our right leg, supporting our body during the stance phase of gait, moves back, our right arm swings forward in a passive motion meant to balance out this movement.
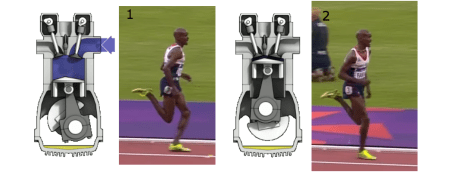
This kind of reciprocal action is very similar to the kind of activity that you find in a lot of modern machines. Let’s take the internal combustion engine as an example. To make this simple, let’s look at a flat twin engine like the one mounted on a lot of BMW motorcycles:

In the image you can see two pistons, each moving in opposition to each other around a crankshaft. This movement is—or should be—a lot like the movement of the legs around the hips. By the way, this imagery isn’t just a metaphor: there are important similarities between the mechanics of the piston system and the mechanics of the hips and legs.
I liken the lowest point in the piston’s rotation to when the leg (the right) is in swing (1). The apex of the piston’s upswing corresponds to midstance, where one leg (the right) is fully supporting the body (2). At the same moment, an opposing piston must be in the lowest point of its downswing in order to balance the mechanism.
Any problems in the balance of the pistons or the crankshaft can cause something to go horribly wrong. The same goes for the body, in order for its movement to be in balance. As the left leg clears the ground behind the body, the right (opposite) arm must be ready to initiate the upswing. And the right leg should be ready to start reaching for the ground below.
Insofar this is the case, the movement can be said to be contralateral.
Let’s look at the pictures of Mo again (taken as he is sprinting down the final stretch of his gold-medal performance in the 10,000 meter event of the 2012 Olympics). As you can see from the right arm in (1) and the left arm in (2), both pictures are taken at the same moment in gait (from the frame of reference of the arms).

By comparing both pictures you can see a bit more flexion in early stance for the left leg (1), than for the right leg (2). At this moment in gait, the right leg trails further behind the body (1) than the left leg. (The left calf (1) is also at a larger angle than the right (2).) Without getting too far into the mechanical details, it would seem that Mo’s having a little bit more trouble stepping forward with the right leg than with the left.
In effect, in picture (1) his left leg is flexed because it’s waiting for the trailing right leg to catch up. And if you look at the orientation of his forearms, you can see that the right elbow (1) is far more flexed than the left (2), mimicking, to almost a perfect degree, the angle of the opposite knee in each of the pictures.
The point is that it wouldn’t matter where you look at the piston system (of an internal combustion engine) from. Whether you observe the piston system from the frame of reference of the piston head, the main axis of the crankshaft, or the counterweights, you would see that the entire system is balanced. Each counterweight remains perfectly opposite to a piston, and the pistons remain perfectly opposite to each other.
This is so important that much of what makes sports cars—particularly “traditional” sports cars like Ferraris—and race cars cost as much as they do is the technology to keep the engine block balanced to the picogram. The better this is accomplished, the more torque can go through the engine without breaking apart the block.
Mo Farah is not some amateur. For the past few years, he has set the highwater mark for excellence in distance running up to the 10,000 meters. And even then there are differences.
Why is this happening? The “big” answer to this question probably isn’t in some esoteric discussion of biomechanics. Quite simply, the 10,000 meters are run on an oval track, and this is the final stretch. For more than 24 laps, he’s been turning into his left leg. It’s probably a lot more tired than his right, so it’s having a harder time supporting his body during stance. (Hence the flexion).
If we asked Mo to keep running for a few more laps (not that he would) we’d find that his right leg would continue to trail a little more, and his left leg would flex even further. If you look at the video you’ll see that even down the final stretch he’s compensating quite well by driving forward with his right shoulder every step.
But as he becomes more tired, we’d see that this strategic compensation stops being enough. We’d probably observe his left foot taking increasingly longer to leave the pronation (flattening) that occurs during the stance phase. The supination (pointing) which occurs towards the end of the stance phase, would come too little, too late, possibly creating a heel whip for the duration of the race.

As this is happening, the huge amount of forces that go into his body as his feet strike the ground will travel through it at increasingly odd angles. There is a potent compounding effect here: The more experienced, fitter, and more rested body aligns itself correctly with the forces of running. The less experienced, less fit, and tired body does not.
For the weekend warrior with the New Year’s resolution, running a marathon is biomechanically a far more hostile experience than it is for the skillful runner. Some people overpronate from the get-go. Others start with a tight hip. Over the course of 40,000 paces, this brings nothing but disaster.
Physics favors the trained runner much like the Greek Gods favored the heroes of mythology, by further increasing their already formidable advantages in battle. The skillful runner already comes into the race with stronger muscles, denser bones, a more resilient nervous system, and a more robust metabolism. As a final reward for their training efforts, the impact forces of running fall into place and work with them, not against.


