Next time you go see a marathon, go look at the elite runners—and then look at everyone else.
You’ll see that elite runners run like little toy soldiers: although they have different body types, their running forms are all nearly identical. The further back you get in the pack, the more “variety” of running strides you’ll see. In other words, across all humans, there is a specific recipe for speed.
Our bodies are all different. Some of us have big feet and short calves, others have long calves and really short arms. When a runner has really long legs but small feet, it becomes really easy for the knee joint to open and close: even though the feet are far away from the hinge (the knee joint), it doesn’t take a lot of power to move them because they don’t weigh very much.
In comparison, a runner with short legs and big feet might use the same amount of energy to open and close their knees. This short-legged runner is at a disadvantage, however: shorter legs means that they cover less ground with each gait cycle, meaning that more energy is expended across the same distance.
However, these differences don’t mean that different runners should use different stride types or different body positions. Achieving a “correct” stride will mean that for one runner, the parts of their body will be at certain angles relative to each other, while for another runner, those angles will be slightly different.
But our bodies all express strength in the same way.
For example, let’s suppose that somebody has a really short abdomen but a really long chest. This person may be inclined to hunch down to lift a heavy object, instead of bending their knees. For them, it may be simpler to stretch and contract the longest part of their upper body, their chest, instead of bending their knees, which is what they should do, mechanically speaking. In other words, this person has to work much harder to develop the muscles that hold their lower spine rigid (back extensors, illiopsoas), in order to safely be able to perform this maneuver. But despite these differences, the only mechanically feasible way to lift heavy objects is by bending from the knees.
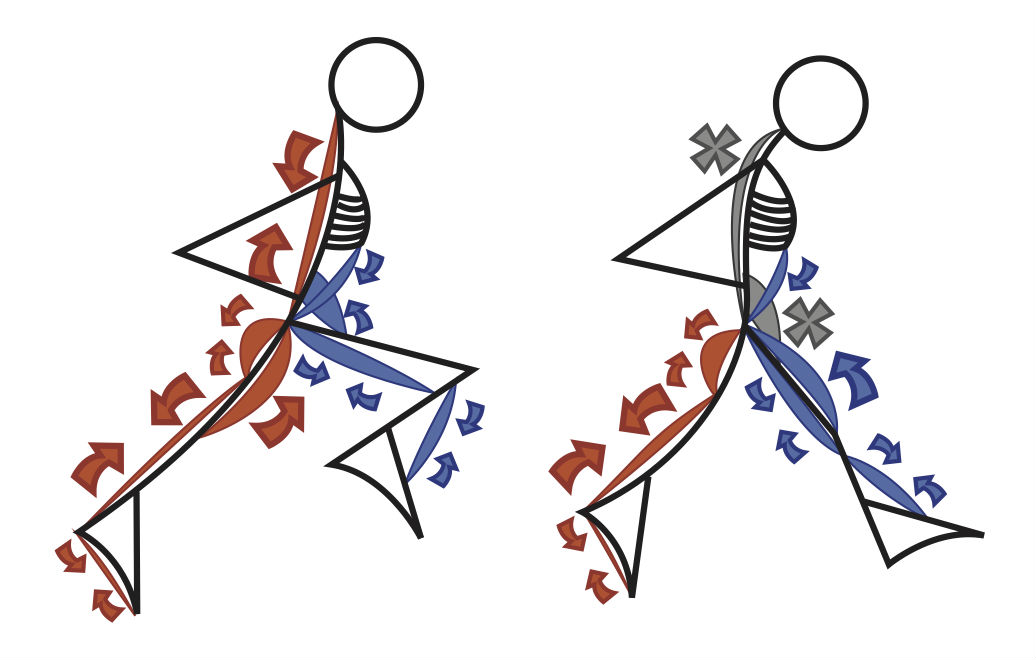
Similarly, there is only one mechanically feasible way to run: by forming a smooth, unbroken arch from the base of the head to the ankle of the leg that’s pushing off the ground. This arch can only be formed when there is a very pronounced knee drive with the opposite leg (which means that the knee continues to be fully flexed at the end of the swing phase).
Because of individual differences such as those mentioned above, certain runners will have to work a lot harder than others at developing certain muscles, in order to create this continuous arch.
In my case, I have short legs, a short lateral arch (of the foot), and a long medial arch. Without going into the nitty-gritty details, this means that it is very easy for my foot to supinate too early in the running stride. Note that this does not mean that I am “a supinator”—or whatever. This means that my anterior compartment (hip abductors and hip flexors) has to be significantly more powerful than if I had longer legs and shorter feet, in order to maintain a midfoot strike while still using the entire foot tripod for pushoff.
My body has to work harder to keep my foot “more” pronated, and my leg “more” everted, throughout the running stride, because the muscles that cause my foot to supinate are longer (and therefore get powerful more easily) than the muscles that cause my foot to pronate.
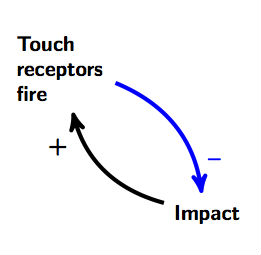
This means that the “untrained” version of my body (without a strong anterior compartment) wants to overstride. Why? Because in order to push off with the entire foot tripod, my body wants to start the contact phase when my foot is at its most pronated. In other words, because I supinate early, my body wants my foot to contact the ground early—and the easiest way to do that is by overstriding.
Furthermore, the only way for that untrained version of my body to midfoot-strike is by contracting the soleus muscle early in the contact phase. In order to go from the contact phase to the stance phase, my ankle has to dorsiflex. But because the soleus was already contracted, it has to work eccentrically in order to allow for this dorsiflexion. This form of midfoot striking put a huge eccentric load on the soleus, which means that my calves can get really really tight really fast if I don’t work heavily on strengthening my anterior compartment.
When I first started running for real, that’s exactly how the story went. My calves were chronically tight, and the answer to that was in developing my frontal compartment. Although different people may have to develop slightly different muscles (for example, someone may need a quadriceps muscle whose lateral head is relatively more powerful than the medial head), the answer for basically everyone who overstrides, or has posterior muscle tightness, is to strengthen the frontal compartment in some fashion.
My end goal was to create a particular structure—a structure which can hold a lot of tensile force, which is firm yet mobile, and which is correctly aligned relative to the force of gravity. As I mentioned above, that structure is a smooth, continuous arch from the base of the head to the ankle. Going about the process of creating that means something slightly different for me than it does for anybody else on the planet.
But nobody will be the most resilient (or fastest) version of themselves without first creating that arch.