One of the constant grievances that I have towards classical running coaching is that beginner runners are treated like “mini-pros.” For novice runners, coaches typically use a scaled-down version of the training that elite runners do. The overall strategy is to develop speed, power, and endurance by periodizing training. Little attention is given to gait consistency or gait characteristics.
This is a problem: Learning how to run isn’t the same as training how to run. For the sake of everyone’s knees, it’s time we incorporated this knowledge into how we coach.
I run a systems thinking blog because I’m interested in, well, systems. A multitude of scientists have been using dynamical systems theory to study the fluctuations in a runner’s stride. They’ve had two very interesting findings: the first is that fluctuations in stride interval—the amount of time between footstrikes—become reduced with increased experience and speed. (This reduction is referred to as “long-range correlations”—that previous steps are more similar or correlated with subsequent steps.)
This seems obvious: when we get more experience, our movements get more consistent, less variable—better trained.
The other finding is that that fluctuations in the stride also decrease when there is injury present. In other words, long-range correlations also increase.
What?
As Nakayama et. al. rightly point out, “the findings that long-range correlations can be decreased as a result of flexible and adaptive motor control utilizing rich information and at the same time as a result of less flexible control due to pathological states or aging seems confusing.”
Yes it does—until you look at the particular claims involved.
The study that claims that variability decreases with experience and speed was studying stride interval. On the other hand, the study that claims that variability increases was studying biomechanic characteristics and particular tissues. Why is this important?
Because there are two different requirements to be satisfied here. Gravity, the force that causes us to accelerate towards the ground, is a constant. This means that there is an optimum time for the human body to be suspended in the air, with the goal of maximizing flight time but reducing landing velocity. Typically, this means a stride rate of ~180 steps per minute. In other words, there is a really good reason for why stride rate would become more constant with experience.
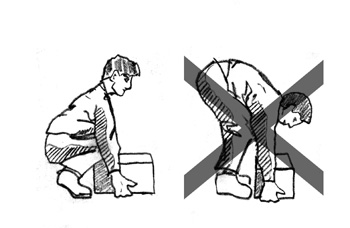
On the other hand, if our particular kinematics—the characteristics of our motion—can’t (and won’t) change, we are going to repetitively stress the same tissues over and over, resulting in injury. Think of it this way: when we start out running, only a few muscles are strong and used to moving together. As we become more practiced, more muscles and body parts become integrated into the stride, and our brain becomes comfortable with a wider array of movements.
J. Hamill et. al. corroborate this: “An optimal solution [means] that no soft tissue would be repeatedly stressed. The healthy state, therefore, is one in which no tissue is repeatedly stressed which results from the relatively greater variability of joint couplings.”
Gaining experience essentially means that we gain greater control. When you’re doing target practice with a rifle, this means that you have to reduce motion—hold the rifle steady. But when you’re running, this means that you’re interacting with variable terrain for a long time.
In other words, not only does your brain have to adapt every landing slightly differently, but it has to do so with control. It’s not enough to make every stride different just to spread out the wear and tear—this has to be done in a way that recognizes the differences in substrate, inclination, etc.
To simplify this and bring it back to coaching, this means that control takes time and practice. Furthermore, this adds evidence to the idea that increased control makes you less likely to be injured. What should coaches be teaching those who are learning to run? Control.
If you’re new to running, this means that it’s extremely important to take it easy, and do first things first. That’s why I always recommend jumping rope as a way to get comfortable with gravity. Also, look for a strength/stability program for runners containing exercises like these, presented by P.A.C.E. coach and strength training guru Dr. David McHenry.
If you want to reduce your risk of injury, get control. This takes time. Until you have control, and you’ve developed substantial speed and even greater endurance based on that control, you’re not ready to run a marathon.
Don’t train with your eye on today’s finish line. Train with your eye on next year’s.